DINGS' offers 3 different microstepping drivers which is pulse and direction mode based. And also dynamic closed loop stand alone electronic is available.
From Min. 2.2A [up to NEMA17 Stepper size] to Max. 7.6A [up to NEMA34 Stepper size], convenient drivers can be chosen. Pulse/RS485 supported closed loop driver and Pulse/RS485/CC-Link supported open loop electronics are available.


In a mobile environment, you can move left and right to see the contents (tables).
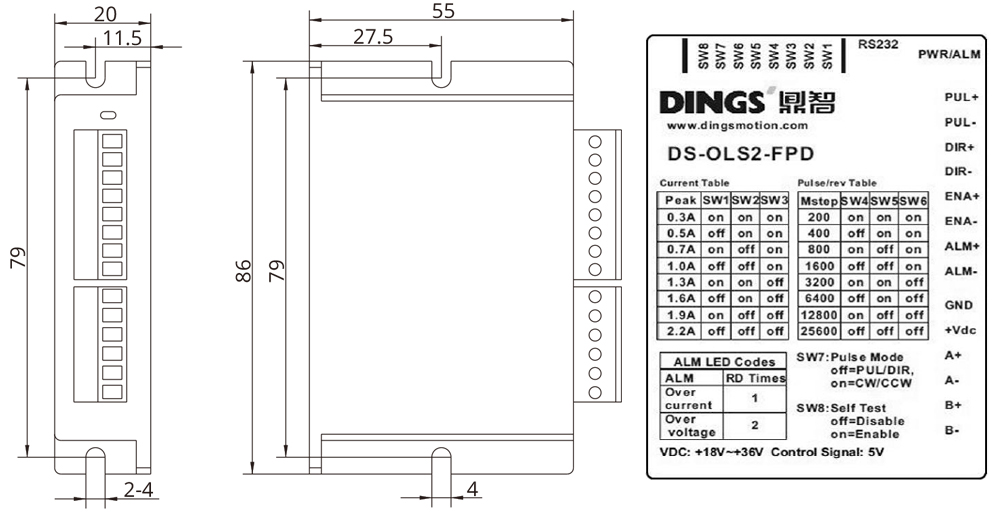
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 2.2A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 36VDC | ||||
| Output current | 0.3A - 2.2A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | Pulse-direction control | ||||
| Encoder support | No | ||||
| Input signal | Pulse signal | Opto-isolated input: H = 3.5–26V, L = 0–0.8V, input current 6–15mA, max. response frequency 200kHz | |||
| Direction signal | |||||
| Enable signal | |||||
| Output signal | Alarm output | Opto-isolated output: max. voltage 30VDC, max. current 50mA | |||
| Size (excluding connector) | 86 × 55 × 20 mm | ||||
| Weight (excluding connector) | about 90g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||
| File Name | Format | Size | Download |
|---|---|---|---|
 DS-OLS2-FPD Manual DS-OLS2-FPD Manual |
916.29 KB | Download |

In a mobile environment, you can move left and right to see the contents (tables).
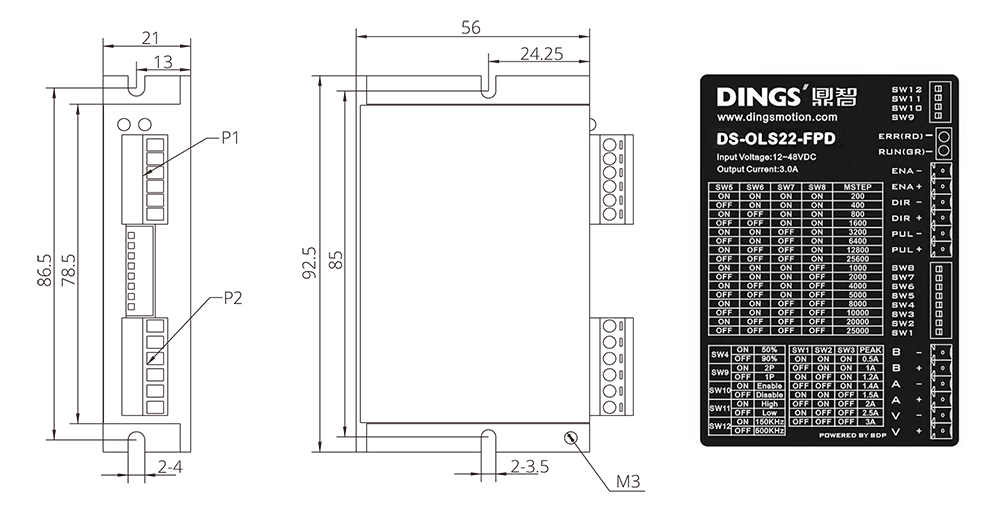
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 3A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 12 - 48VDC | ||||
| Output current | 0.5A - 3A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Input signal | Pulse signal | Opto-isolated input: H = 3.5 – 26 V, L = 0 – 0.8 V, input current 6 - 15 mA | |||
| Direction signal | |||||
| Enable signal | |||||
| Size (excluding connector) | 92.5 × 56 × 21 mm | ||||
| Weight (excluding connector) | about 96g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||

| File Name | Format | Size | Download |
|---|---|---|---|
 DS-OLS22-FPD Manual DS-OLS22-FPD Manual |
972.34 KB | Download |

In a mobile environment, you can move left and right to see the contents (tables).
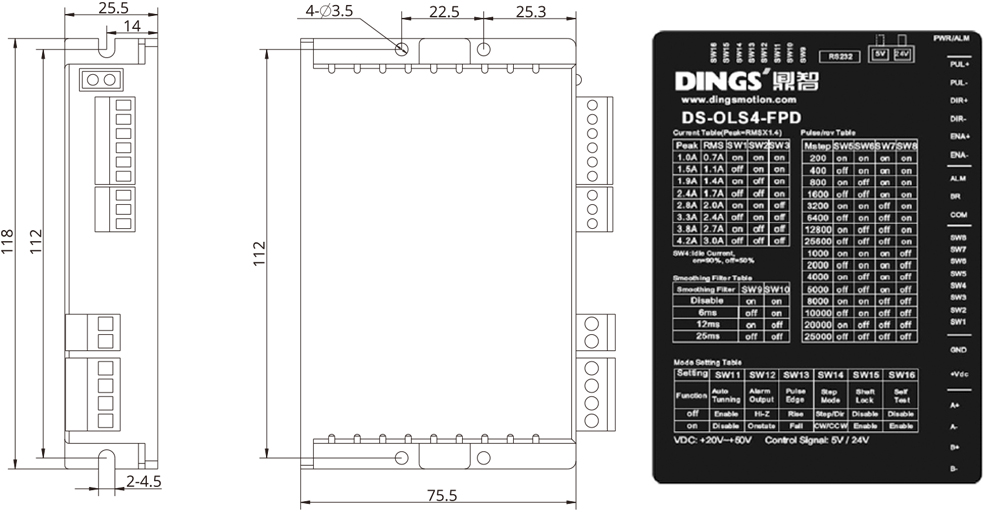
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 4.2A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 48VDC | ||||
| Output current | 1.0A - 4.2A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | Pulse-direction control | ||||
| Encoder support | No | ||||
| Input signal | Pulse signal Direction signal |
DIP selectable 24V signal | Opto-isolated input: H = 18–28V, L = 0–0.8V, input current 6–15mA, max. response frequency 200kHz |
||
| DIP selectable 5V signal | Opto-isolated input: H = 3.5–5V, L = 0–0.8V, input current 6–15mA, max. response frequency 200kHz |
||||
| Enable signal | Opto-isolated input: H = 3.5–26V, L = 0–0.8V, input current 6–15mA | ||||
| Output signal | Alarm output | Opto-isolated output: max. voltage 30VDC, max. current 100mA | |||
| Size (excluding connector) | 118 × 75.5 × 25.5 mm | ||||
| Weight (excluding connector) | about 240g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||
| File Name | Format | Size | Download |
|---|---|---|---|
 DS-OLS4-FPD Manual DS-OLS4-FPD Manual |
915.66 KB | Download |

In a mobile environment, you can move left and right to see the contents (tables).
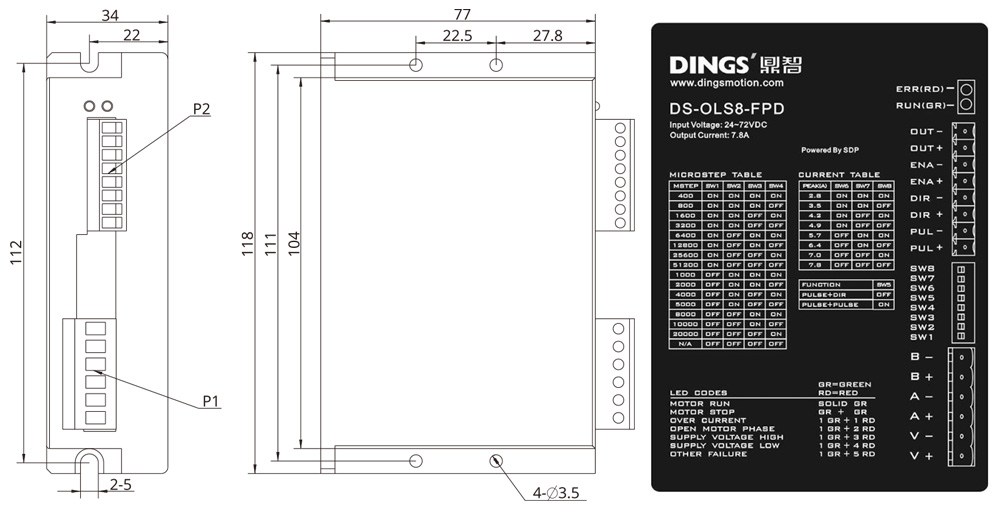
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 7.8A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 72VDC | ||||
| Output current | 2.8A - 7.8A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | Pulse-direction control | ||||
| Encoder support | No | ||||
| Input signal | Pulse signal | Opto-isolated input: H = 3.5~26V, L = 0~0.8V, input current 6~15mA, max. response frequency 500kHz |
|||
| Direction signal | |||||
| Enable signal | |||||
| Output signal | Alarm output | Opto-isolated output: max. voltage 30VDC, max. current 50mA | |||
| Size (excluding connector) | 118 × 77 × 34 mm | ||||
| Weight (excluding connector) | about 300g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||
| File Name | Format | Size | Download |
|---|---|---|---|
 DS-OLS8-FPD Manual DS-OLS8-FPD Manual |
910.52 KB | Download |

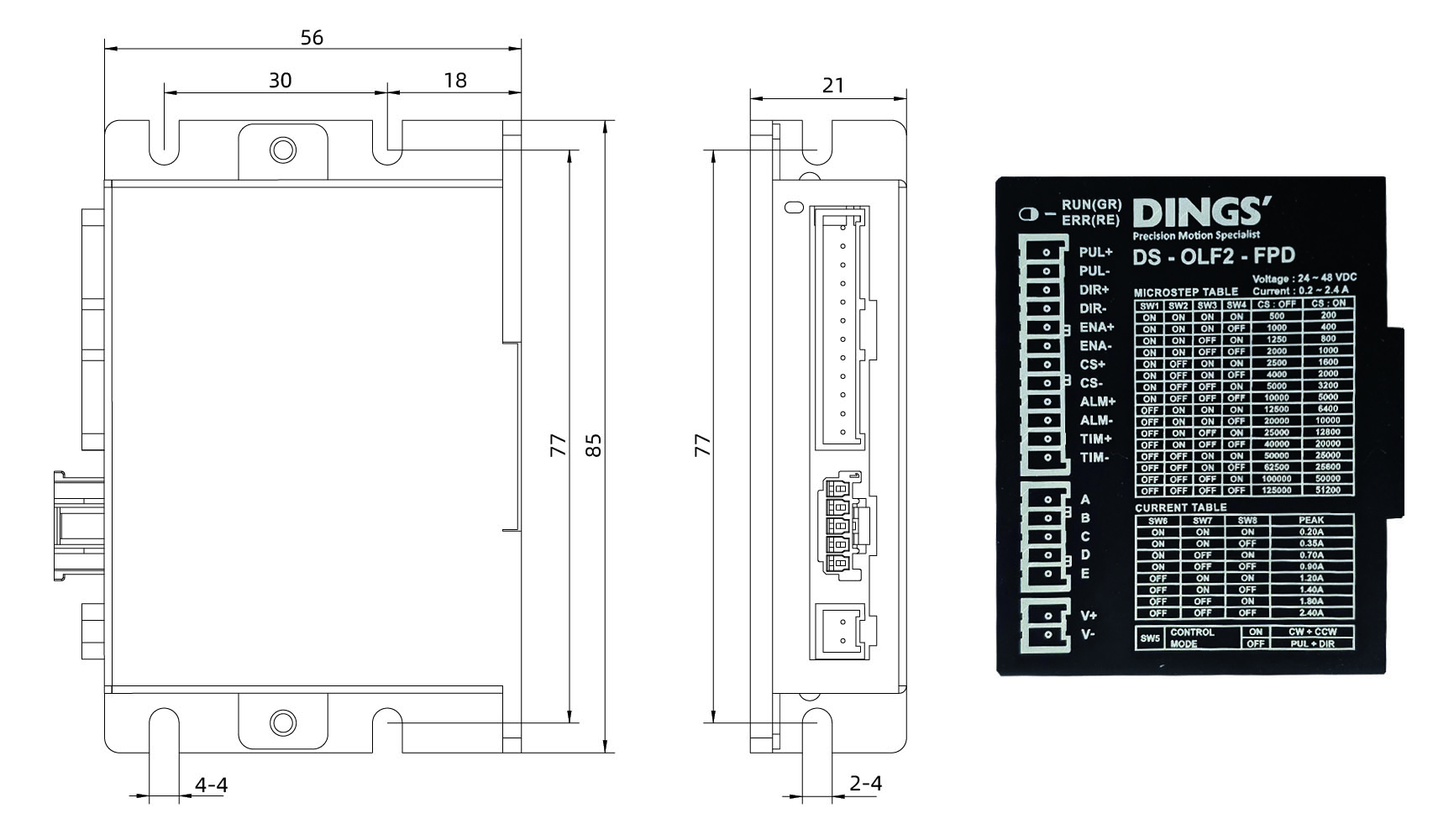
In a mobile environment, you can move left and right to see the contents (tables).
| Adapted motor | 5-phase hybrid stepper motor, max supported current : 2.4A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 36VDC | ||||
| Output current | 0.2A - 2.4A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | Pulse-direction control | ||||
| Encoder support | No | ||||
| Input signal | Pulse signal | Opto-isolated input: H = 3.5~5V, L = 0~0.8V, input current 5~8mA | |||
| Enable signal | |||||
| Direction signal | |||||
| Select signal | |||||
| Output signal | Alarm output | Opto-isolated output: max. voltage 30VDC, max. current 10mA | |||
| Size (excluding connector) | 85 × 56 × 21 mm | ||||
| Weight (excluding connector) | about 96g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||

| File Name | Format | Size | Download |
|---|---|---|---|
| DS-OLF2-FPD |
830.78 KB | Download |

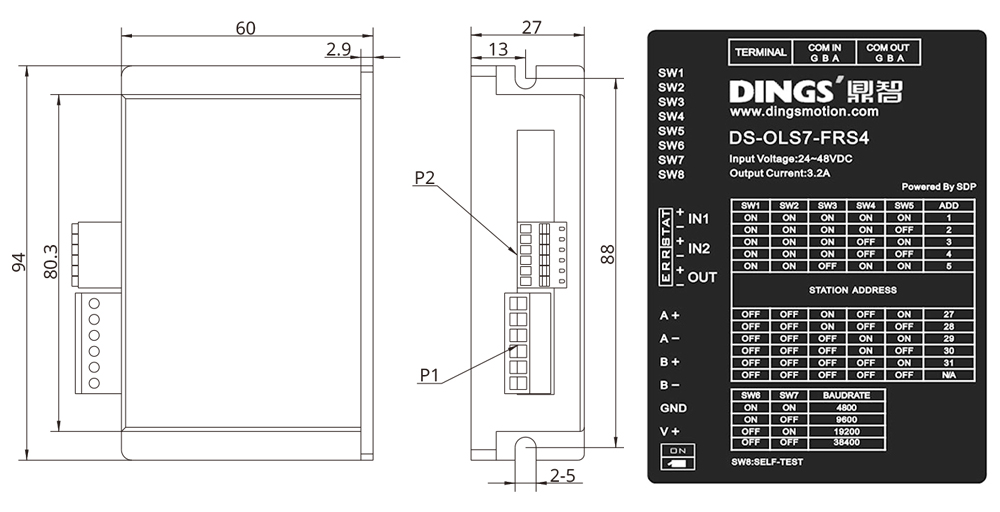
In a mobile environment, you can move left and right to see the contents (tables).
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 3.2A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 48VDC | ||||
| Output current | 0.1A - 3.2A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | Pulse-direction control / RS485 communication control | ||||
| Encoder support | No | ||||
| Input signal | IN1 (DIR) signal | Opto-isolated input: H = 3.5~26V, L = 0~0.8V, input current 6~15mA, max. response frequency 500kHz |
|||
| IN2 (STEP) signal | |||||
| Output signal | Alarm output | Opto-isolated output: max. voltage 30VDC, max. current 50mA | |||
| Size (excluding connector) | 94 × 60 × 27 mm | ||||
| Weight (excluding connector) | about 175g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||
| File Name | Format | Size | Download |
|---|---|---|---|
 DS-OLS7-FRS4 Manual DS-OLS7-FRS4 Manual |
1.17 MB | Download | |
 DINGS' Tuner Pro_User Manual DINGS' Tuner Pro_User Manual |
1.88 MB | Download | |
 Stand Alone Drive_Accessory Selection Manual Stand Alone Drive_Accessory Selection Manual |
2.68 MB | Download |
| File Name | Format | Size | Download |
|---|---|---|---|
| DINGS' Tuner Pro v4.1.15 | ZIP | 3.38 MB | Download |
| FTDI USB Installation | ZIP | 5.85 MB | Download |

In a mobile environment, you can move left and right to see the contents (tables).
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 6.5A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 72VDC | ||||
| Output current | 0.1A - 6.5A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | Pulse-direction control / RS485 communication control | ||||
| Encoder support | No | ||||
| Input signal | Pulse signal | Opto-isolated input: H = 3.5~26V, L = 0~0.8V, input current 6~15mA, max. response frequency 500kHz |
|||
| Direction signal | |||||
| Enable signal | |||||
| Output signal | Alarm output | Opto-isolated output: max. voltage 30VDC, max. current 50mA | |||
| Size (excluding connector) | 118 × 78 × 34 mm | ||||
| Weight (excluding connector) | about 300g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||

| File Name | Format | Size | Download |
|---|---|---|---|
 DS-OLS8-FRS4 Manual DS-OLS8-FRS4 Manual |
1.46 MB | Download | |
| DINGS' Tuner Pro_User Manual |
1.88 MB | Download | |
| Stand Alone Drive_Accessory Selection Manual |
2.68 MB | Download |
| File Name | Format | Size | Download |
|---|---|---|---|
| DINGS' Tuner Pro v4.1.15 | ZIP | 3.38 MB | Download |
| FTDI USB Installation | ZIP | 5.85 MB | Download |

In a mobile environment, you can move left and right to see the contents (tables).
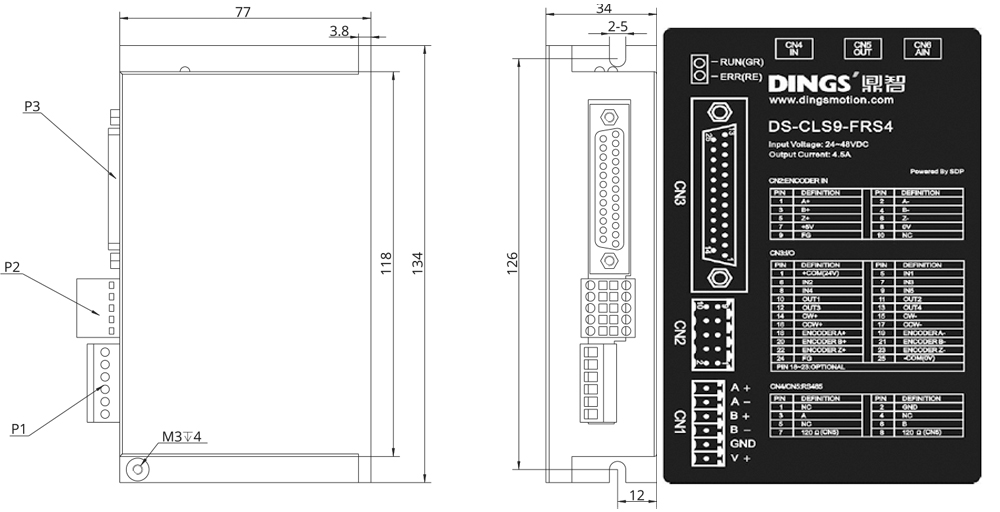
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 4.5A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 48VDC | ||||
| Output current | 0.1A - 4.5A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | Pulse-direction control / RS485 communication control | ||||
| Encoder support | INC Encoder support | ||||
| Input signal | 2 high-speed inputs | Opto-isolated input: H = 3.5~26V, L = 0~0.8V, input current 6~15mA, max. response frequency 200kHz | |||
| 5 general inputs | Opto-isolated input: H = 18~28V, L = 0~0.8V, input current 6~15mA | ||||
| Output signal | 4 general outputs | Opto-isolated output: max. voltage 30VDC, max. current 50mA | |||
| Size (excluding connector) | 134 × 77 × 34 mm | ||||
| Weight (excluding connector) | about 350g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||
| File Name | Format | Size | Download |
|---|---|---|---|
 DS-CLS9-FRS4 Manual DS-CLS9-FRS4 Manual |
1.54 MB | Download | |
| DINGS' Tuner Pro_User Manual |
1.88 MB | Download | |
| Stand Alone Drive_Accessory Selection Manual |
2.68 MB | Download |
| File Name | Format | Size | Download |
|---|---|---|---|
| DINGS' Tuner Pro v4.1.15 | ZIP | 3.38 MB | Download |
| FTDI USB Installation | ZIP | 5.85 MB | Download |

In a mobile environment, you can move left and right to see the contents (tables).
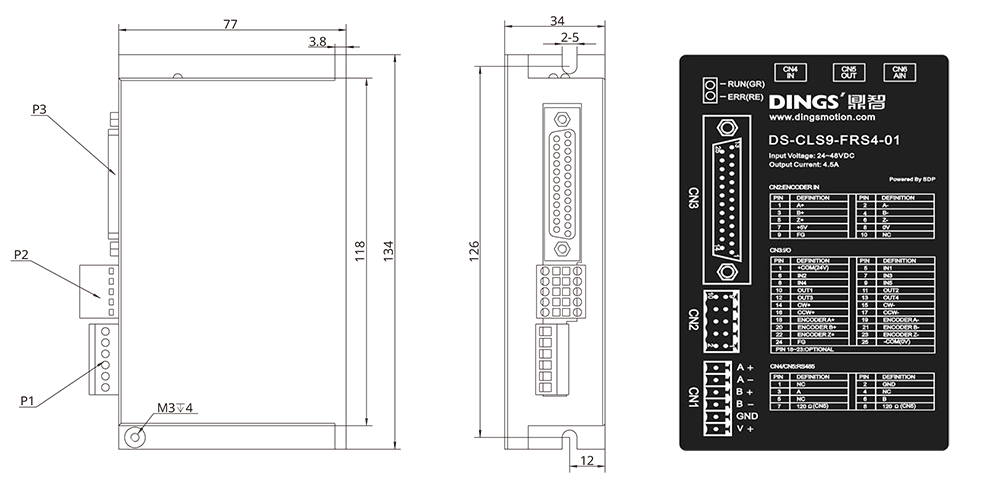
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 4.5A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 48VDC | ||||
| Output current | 0.1A - 4.5A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | Pulse-direction control / RS485 communication control | ||||
| Encoder support | INC Encoder support | ||||
| Input signal | 2 high-speed inputs | Opto-isolated input: H = 3.5~26V, L = 0~0.8V, input current 6~15mA, max. response frequency 200kHz | |||
| 5 general inputs | Opto-isolated input: H = 18~28V, L = 0~0.8V, input current 6~15mA | ||||
| Output signal | 4 general outputs | Opto-isolated output: max. voltage 30VDC, max. current 50mA | |||
| Size (excluding connector) | 134 × 77 × 34 mm | ||||
| Weight (excluding connector) | about 350g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||
| File Name | Format | Size | Download |
|---|---|---|---|
 DS-CLS9-FRS4-01 Manual DS-CLS9-FRS4-01 Manual |
1.61 MB | Download | |
| DINGS' Tuner Pro_User Manual |
1.88 MB | Download | |
| Stand Alone Drive_Accessory Selection Manual |
2.68 MB | Download |
| File Name | Format | Size | Download |
|---|---|---|---|
| DINGS' Tuner Pro v4.1.15 | ZIP | 3.38 MB | Download |
| FTDI USB Installation | ZIP | 5.85 MB | Download |

In a mobile environment, you can move left and right to see the contents (tables).
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 6.0A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 72VDC | ||||
| Output current | 0.4A - 6.0A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | Pulse-direction control / RS485 communication control | ||||
| Encoder support | INC Encoder support | ||||
| Input signal | 2 high-speed inputs | Opto-isolated input: H = 3.5~26V, L = 0~0.8V, input current 6~15mA, max. response frequency 200kHz | |||
| 5 general inputs | Opto-isolated input: H = 18~28V, L = 0~0.8V, input current 6~15mA | ||||
| Output signal | 3 general outputs | Opto-isolated output: max. voltage 30VDC, max. current 50mA | |||
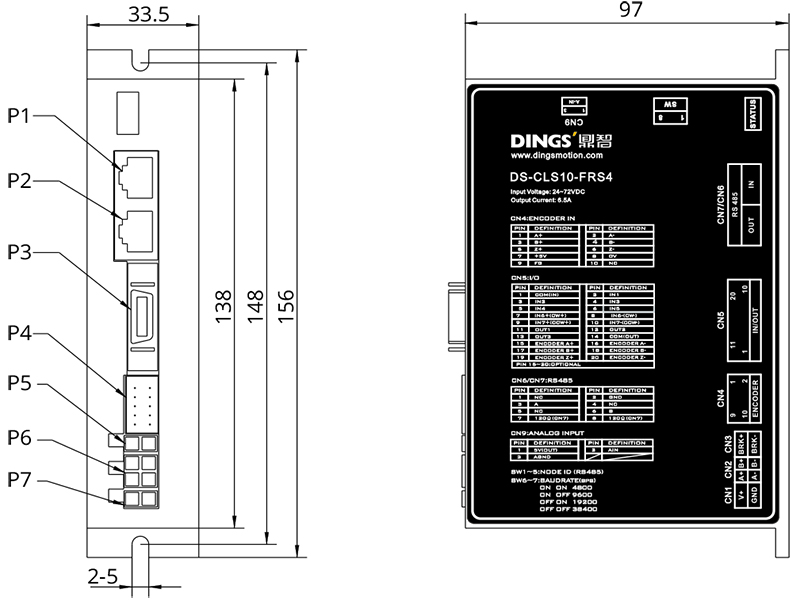
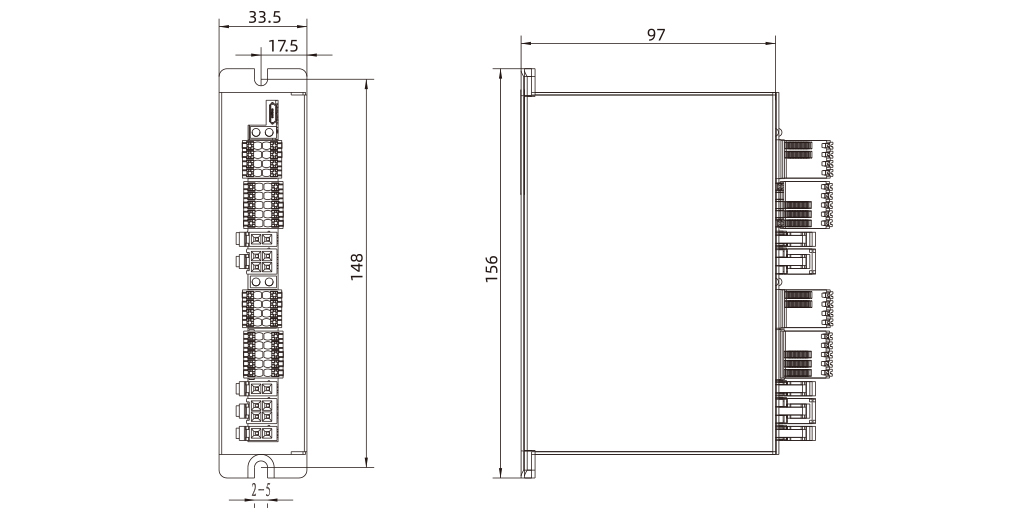
| Size (excluding connector) | 156 × 97 × 33.5 mm | ||||
| Weight (excluding connector) | about 376g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||

| File Name | Format | Size | Download |
|---|---|---|---|
 DS-CLS10-FRS4 DS-CLS10-FRS4 |
1.86 MB | Download | |
| DINGS' Tuner Pro_User Manual |
1.88 MB | Download | |
| Stand Alone Drive_Accessory Selection Manual |
2.68 MB | Download |
| File Name | Format | Size | Download |
|---|---|---|---|
| DINGS' Tuner Pro v4.1.15 | ZIP | 3.38 MB | Download |

In a mobile environment, you can move left and right to see the contents (tables).
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 6.5A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 72VDC | ||||
| Output current | 6.5A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | Pulse-direction control / RS485 communication control | ||||
| Encoder support | ABS Encoder support (BiSS-C type, 16-bit single-turn / 16-bit multi-turn) |
||||
| Input signal | 2 high-speed inputs | Opto-isolated input: H = 3.5~26V, L = 0~0.8V, input current 6~15mA, max. response frequency 200kHz | |||
| 5 general inputs | Opto-isolated input: H = 18~28V, L = 0~0.8V, input current 6~15mA | ||||
| Output signal | 3 general outputs | Opto-isolated output: max. voltage 30VDC, max. current 50mA | |||
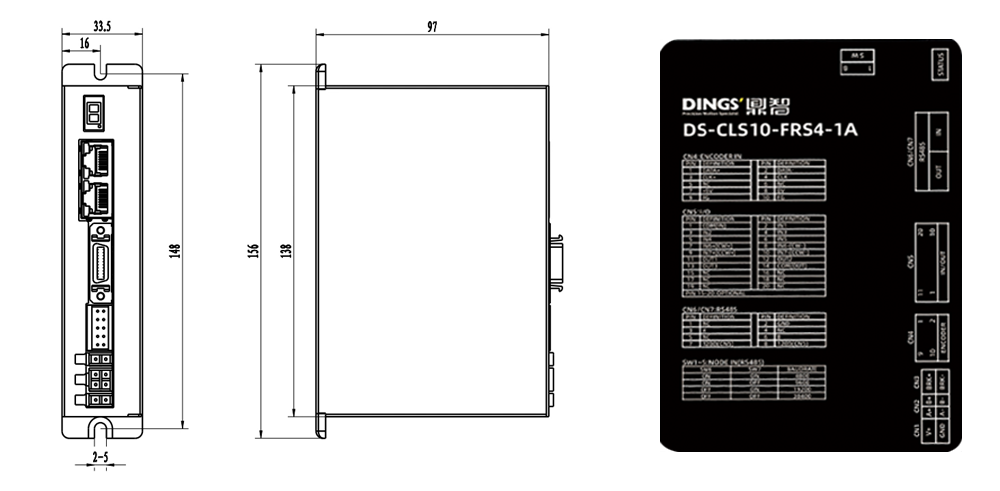
| Size (excluding connector) | 156 × 97 × 33.5 mm | ||||
| Weight (excluding connector) | about 500g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||
| File Name | Format | Size | Download |
|---|---|---|---|
| DS-CLS10-FRS4-1A |
973.92 KB | Download | |
| DINGS' Tuner Pro_User Manual |
1.88 MB | Download |
| File Name | Format | Size | Download |
|---|---|---|---|
| DINGS' Tuner Pro v4.1.15 | ZIP | 3.38 MB | Download |

In a mobile environment, you can move left and right to see the contents (tables).
| Adapted motor | 2-phase/3-phase/5-phase hybrid stepper motors, max supported current : 3.0A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 36VDC | ||||
| Output current | 0.4A - 3.0A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | EtherCAT communication control | ||||
| Encoder support | INC Encoder support | ||||
| Input signal | 1×4 high-speed input | Opto-isolated input: H = 24V, L = 0~0.8V, input current 5~8mA, max. response frequency 100kHz | |||
| 3×4 general inputs | Opto-isolated input: H = 24V, L = 0~0.8V, input current 5~8mA, max. response frequency 1kHz | ||||
| Output signal | 2×4 general outputs | Opto-isolated output: max. voltage 30VDC, max. current 50mA | |||
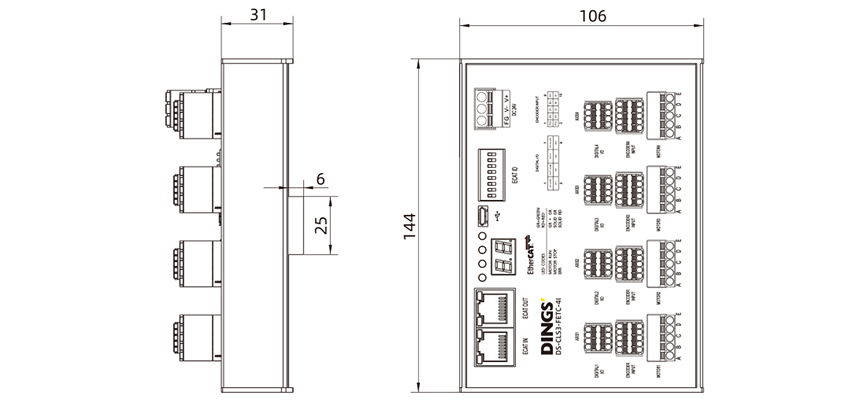
| Size (excluding connector) | 144 × 106 × 31 mm | ||||
| Weight (excluding connector) | about 450g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||

| File Name | Format | Size | Download |
|---|---|---|---|
| DS-CLS3-FETC-4I Manual |
2.6 MB | Download | |
| Stand Alone Drive_Accessory Selection Manual |
2.68 MB | Download |
| File Name | Format | Size | Download |
|---|---|---|---|
| DINGS' Tuner FB | RAR | 1.05 MB | Download |
| XML File : DS-CLS3-FETC-4I | ZIP | 229.03 KB | Download |
| FTDI USB Installation | ZIP | 5.85 MB | Download |
In a mobile environment, you can move left and right to see the contents (tables).
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 6.5A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 48VDC | ||||
| Output current | 0.1A - 6.5A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | EtherCAT communication control | ||||
| Encoder support | INC Encoder support | ||||
| Input signal | 2 high-speed inputs | Opto-isolated input: H = 3.5~26V, L = 0~0.8V, input current 6~15mA, max. response frequency 500kHz | |||
| 5 general inputs | Opto-isolated input: H = 18~28V, L = 0~0.8V, input current 6~15mA | ||||
| Output signal | 3 general outputs | Opto-isolated output: max. voltage 30VDC, max. current 50mA | |||
| 1 brake output | Opto-isolated output: max. voltage 30VDC, max. current 500mA | ||||
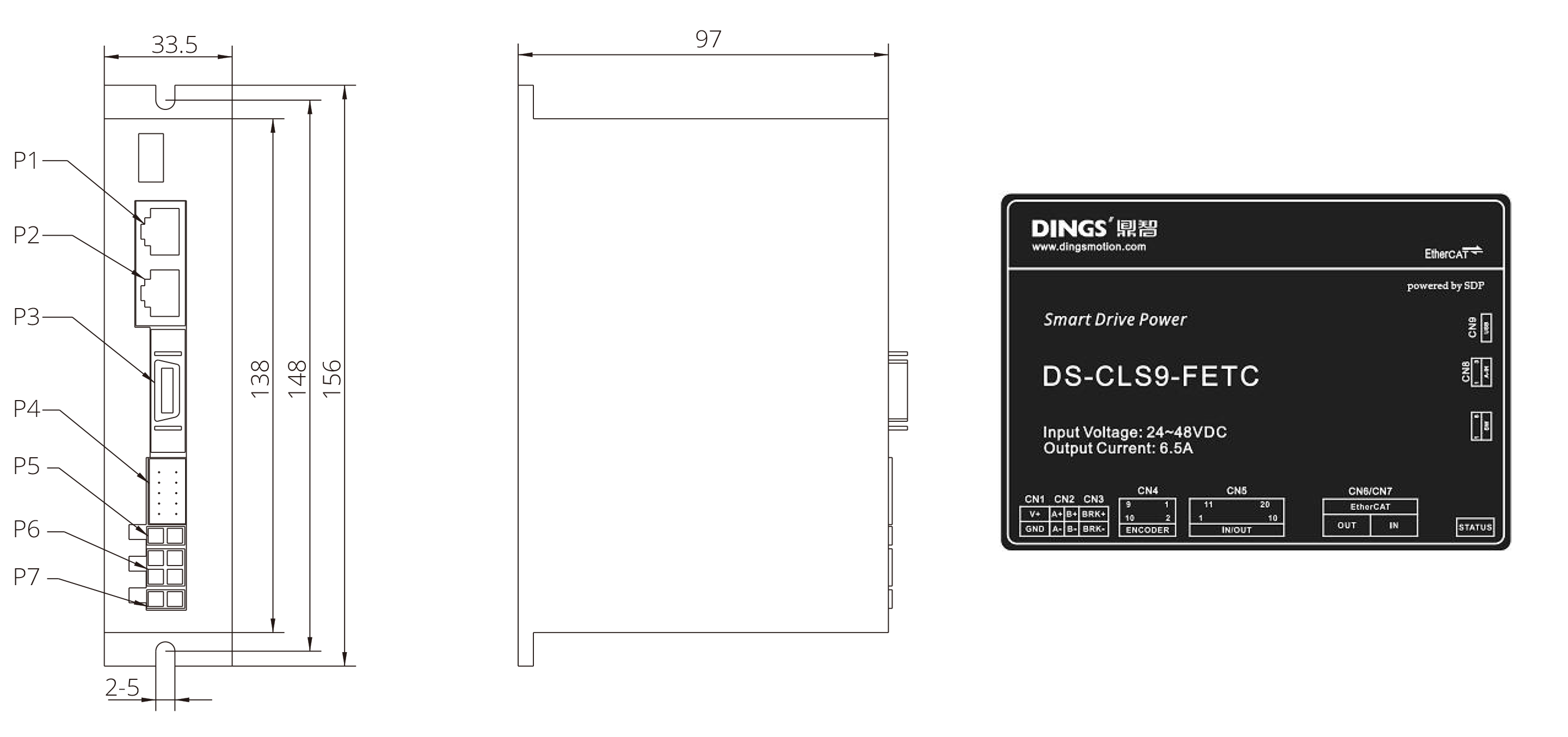
| Size (excluding connector) | 156 × 97 × 33.5 mm | ||||
| Weight (excluding connector) | about 500g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||

| File Name | Format | Size | Download |
|---|---|---|---|
 DS-CLS9-FETC Manual DS-CLS9-FETC Manual |
1.16 MB | Download | |
| Stand Alone Drive_Accessory Selection Manual |
2.68 MB | Download |
| File Name | Format | Size | Download |
|---|---|---|---|
| DINGS' Tuner FB | RAR | 1.05 MB | Download |
| FTDI USB Installation | ZIP | 5.85 MB | Download |
| XML File | ZIP | 7.01 KB | Download |

In a mobile environment, you can move left and right to see the contents (tables).
| Drive model | DS-CLS9-FETC-2I | DS-CLS9-FETC-2A | |||
|---|---|---|---|---|---|
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 6.5A (max.) | ||||
| Power supply | 24 - 48VDC | ||||
| Output current | 0.4A - 6.5A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | EtherCAT communication control | ||||
| Encoder support | INC Encoder support | ABS Encoder support (BiSS-C type, 16-bit single-turn / 16-bit multi-turn) |
|||
| Input signal | 1×2 high-speed input | Opto-isolated input: H = 24V, L = 0~0.8V, input current 5~8mA, max. response frequency 100kHz | |||
| 3×2 general inputs | Opto-isolated input: H = 24V, L = 0~0.8V, input current 5~8mA, max. response frequency 1kHz | ||||
| Output signal | 2×2 general outputs | Opto-isolated output: max. voltage 30VDC, max. current 50mA | |||
| 1×2 brake output | Opto-isolated output: max. voltage 30VDC, max. current 500mA | ||||
| Size (excluding connector) | 156 × 97 × 34 mm | ||||
| Weight (excluding connector) | about 500g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||

| File Name | Format | Size | Download |
|---|---|---|---|
 DS-CLS9-FETC-2I
DS-CLS9-FETC-2I
|
3.35 MB | Download | |
 DS-CLS9-FETC-2A
DS-CLS9-FETC-2A
|
3.49 MB | Download | |
|
Stand Alone Drive_Accessory Selection Manual
|
2.68 MB | Download |
| File Name | Format | Size | Download |
|---|---|---|---|
| DINGS' Tuner FB | RAR | 1.05 MB | Download |
| XML File : DS-CLS9-FETC-2I/2A | ZIP | 375.25 KB | Download |
| FTDI USB Installation | ZIP | 5.85 MB | Download |

In a mobile environment, you can move left and right to see the contents (tables).
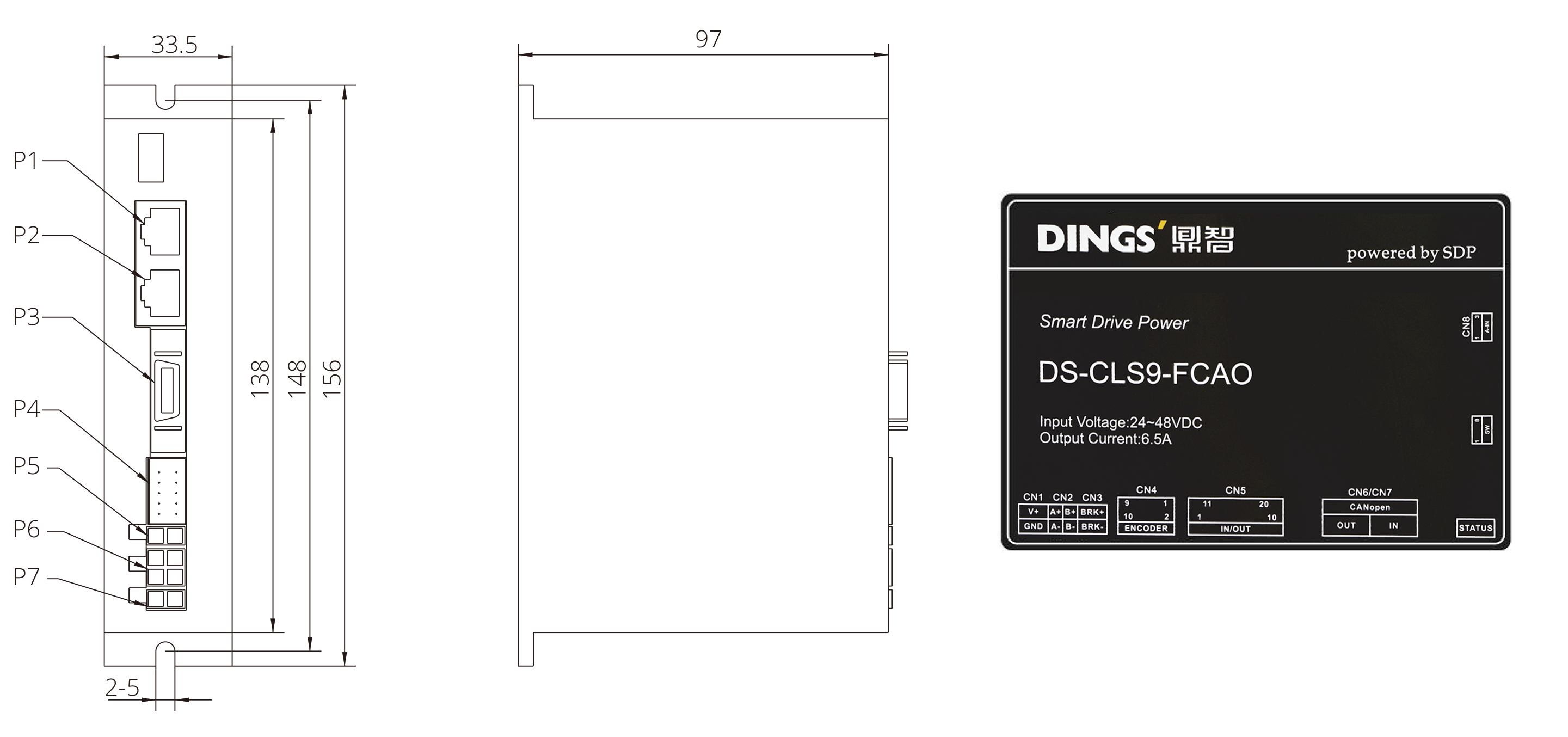
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 6.5A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 48VDC | ||||
| Output current | 0.1A - 6.5A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | CANopen communication control | ||||
| Encoder support | INC Encoder support | ||||
| Input signal | 2 high-speed inputs | Opto-isolated input: H = 3.5~26V, L = 0~0.8V, input current 5~8mA, max. response frequency 500kHz | |||
| 5 general inputs | Opto-isolated input: H = 24V, L = 0~0.8V, input current 5~8mA | ||||
| Output signal | 3 general outputs | Opto-isolated output: max. voltage 30VDC, max. current 50mA | |||
| 1 brake output | Opto-isolated output: max. voltage 30VDC, max. current 500mA | ||||
| Size (excluding connector) | 156 × 97 × 33.5 mm | ||||
| Weight (excluding connector) | about 500g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||
| File Name | Format | Size | Download |
|---|---|---|---|
 DS-CLS9-FCAO Manual DS-CLS9-FCAO Manual |
2.63 MB | Download | |
| Stand Alone Drive_Accessory Selection Manual |
2.68 MB | Download |
| File Name | Format | Size | Download |
|---|---|---|---|
| DINGS' Tuner FB | RAR | 1.05 MB | Download |
| FTDI USB Installation | ZIP | 5.85 MB | Download |
| EDS File | ZIP | 8.47 KB | Download |

In a mobile environment, you can move left and right to see the contents (tables).
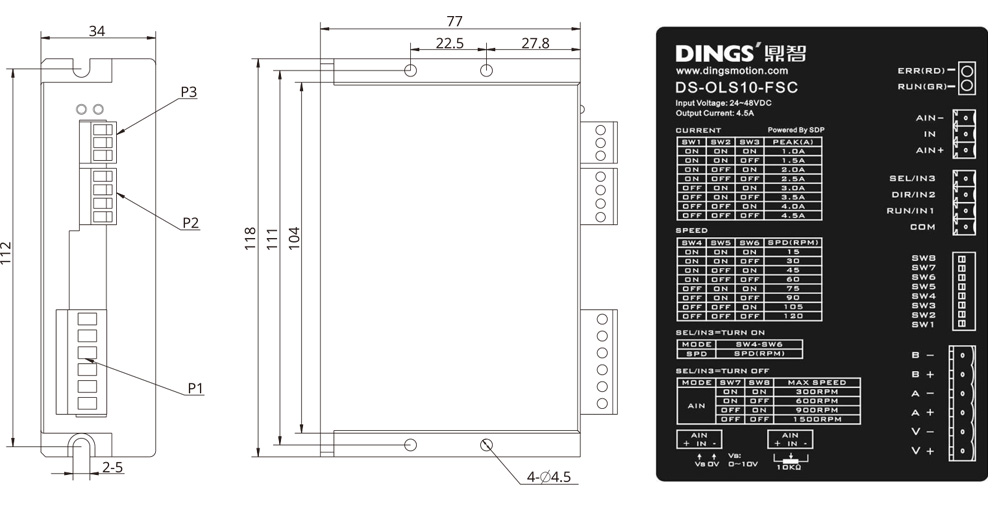
| Adapted motor | 2-phase hybrid stepper motor, max supported current : 4.5A (max.) | ||||
|---|---|---|---|---|---|
| Power supply | 24 - 48VDC | ||||
| Output current | 1.0A - 4.5A / phase (max.) | ||||
| Driving method | Full-bridge bipolar PWM drive | ||||
| Control method | Analog speed control | ||||
| Encoder support | No | ||||
| Input signal | IN 1 (Start) | Opto-isolated input: H = 3.5~26V, L = 0~0.8V, input current 6~15mA | |||
| IN 2 (Direction) | |||||
| IN 1 (Speed switch) | |||||
| Analog input signal | 10KΩ potentiometer or 0–10 VDC analog signal | ||||
| Size (excluding connector) | 118 × 78 × 34 mm | ||||
| Weight (excluding connector) | about 300g | ||||
| Operating environment | Application | Avoid dust, oil mist and corrosive gas | |||
| Humidity | < 85% RH, no condensation | ||||
| Temperature | 0 ~ 40℃ | ||||
| Heat dissipation | Install in a ventilated environment | ||||
| File Name | Format | Size | Download |
|---|---|---|---|
 DS-OLS10-FSC Manual DS-OLS10-FSC Manual |
877.63 KB | Download |