Lead refers to the linear distance the nut travels axially during one complete revolution of the screw.
A larger lead increases the linear travel distance per revolution and generally allows higher travel speed. Lead is calculated by multiplying the pitch by the number of starts.
Pitch refers to the axial distance between adjacent threads.
In a single-start screw, the pitch is equal to the lead, while in a multi-start screw the lead is greater than the pitch.
Multi-start screw designs generally provide higher travel efficiency and smoother power transmission characteristics.
Lead screw accuracy refers to the cumulative deviation between the theoretical travel distance and the actual travel distance over a specified reference length.
For example, a screw with a lead accuracy of 0.004 inch/foot may exhibit a positional deviation of up to ±0.004 inch over one foot of travel. Lead screw accuracy is a critical factor that directly affects the positioning accuracy and repeatability of the overall motion system.
Position tolerance refers to the deviation between the theoretical target position and the actual traveled position.
Position deviation may be affected by the mechanical structure, lead screw accuracy, and assembly condition of the system.
In vertical applications, backdriving may occur when motor power is removed or when no braking mechanism is applied. Additional gravitational load conditions should also be considered during system design.
Resonance in hybrid stepper motors typically occurs around the 200 PPS operating range.
Microstepping control is effective in reducing vibration and audible noise within this range.
Stepper motors require external drives for operation.
Most commercial drive products integrate power circuits, logic circuits, switching components, and pulse control functions.
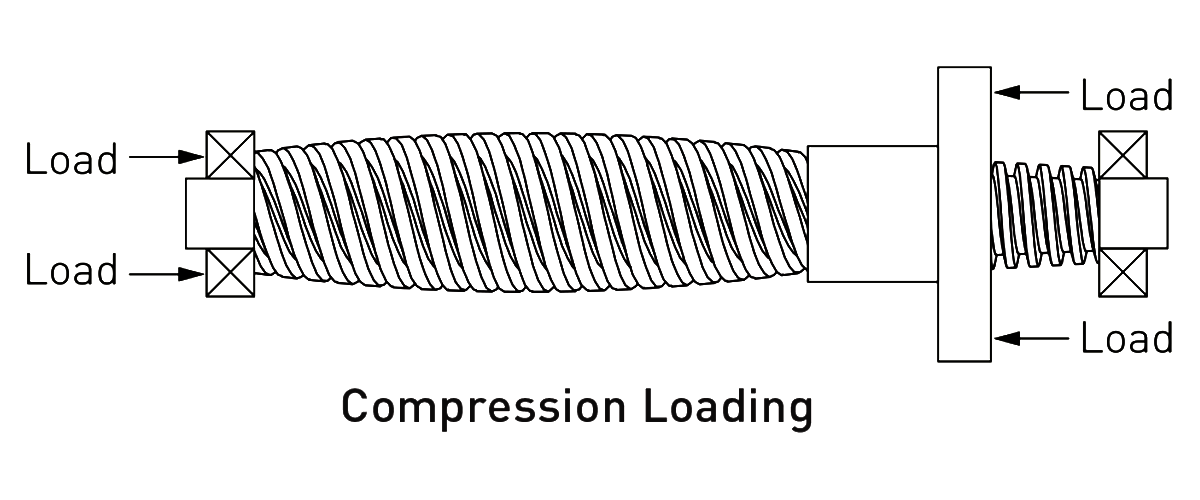
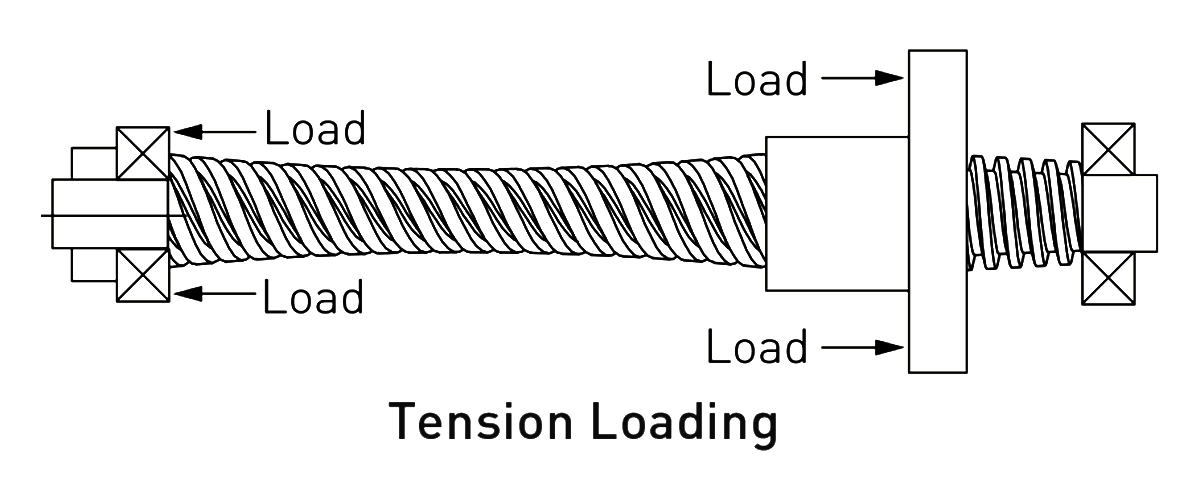
A load that tends to stretch the screw is referred to as a tension load, while a load that compresses the screw is referred to as a compression load.
Under compression loading conditions, the screw should be designed with consideration for axial strength against column loading.
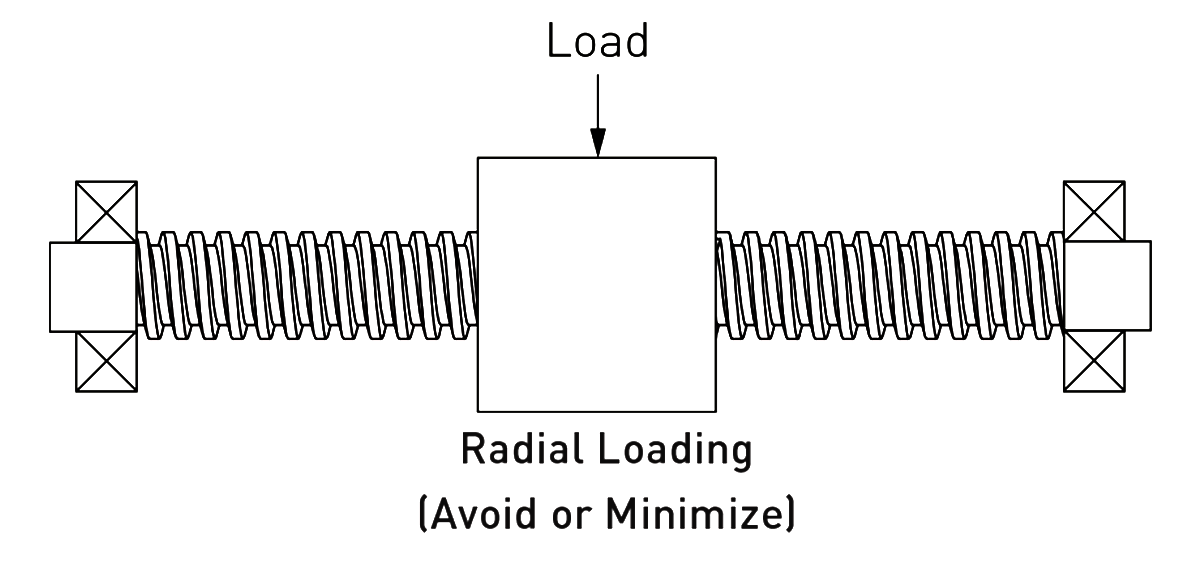
Load applied perpendicular to the screw axis.
The use of additional support mechanisms such as linear guides is recommended.
Load applied along the centerline direction of the lead screw.
Phenomenon in which axial load causes the screw or nut to rotate in the reverse direction.
Lead screws with efficiencies above 50% generally have a higher tendency to backdrive, while lead screws with efficiencies below 35% are more effective in preventing this condition.
Smaller lead values can further reduce the possibility of backdriving or free rotation, and vertical systems are generally more susceptible to backdriving due to gravity.
Motor torque required to drive a lead screw is composed of the following components.
The nut material (Delrin) incorporates self-lubricating properties that minimize the need for additional lubrication. Teflon-coated screw options can further reduce friction and help extend overall system life.
Standard metric and inch end machining options are available. Custom end machining specifications are also supported according to customer requirements. Please contact DINGS' for additional information.
The performance of a lead screw system, including speed and efficiency, may be affected by how the screw ends are mounted and supported.
| Type of End Fixity | Relative Rigidity | Critical Speed Factor | Critical Rod Factor |
|---|---|---|---|
 |
Less Rigid | 0.32 | 0.25 |
 |
Rigid | 1.0 | 1.0 |
 |
More Rigid | 1.55 | 2.0 |
 |
Most Rigid | 2.24 | 4.0 |
Rotational speed at which the screw first reaches its resonance region due to screw deflection or instability.
Within this speed range, vibration and unstable system behavior may occur. Critical speed may be affected by the following factors.
For example, a screw with a diameter of 19.05 mm (0.75 inch) and a length of 1778 mm (70 inch) has a critical speed of approximately 187 RPM under the conditions of safety factor K = 1.25 and FS = 0.32.
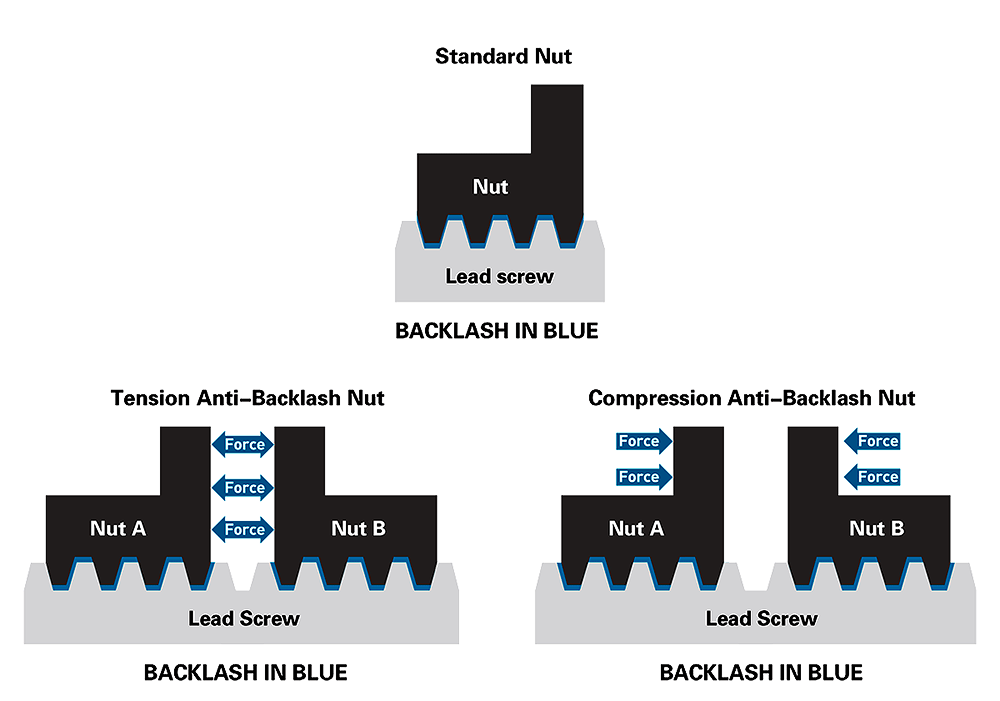
Relative axial clearance generated between the screw and nut.
It is normal for backlash to gradually increase over time with continued use.
Backlash compensation can be minimized through the use of anti-backlash nuts, and backlash primarily affects bidirectional positioning accuracy.