
In a mobile environment, you can move left and right to see the contents (tables).
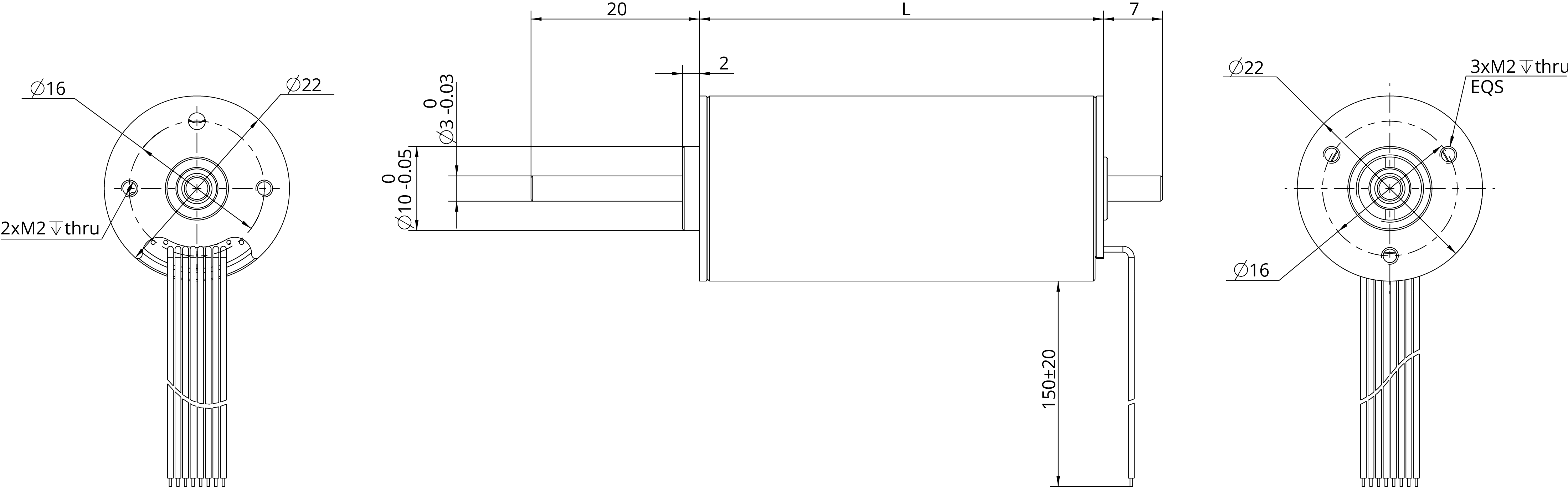
| Motor part number | - | 22ZWWC48 | 22ZWWC64 | |||||
|---|---|---|---|---|---|---|---|---|
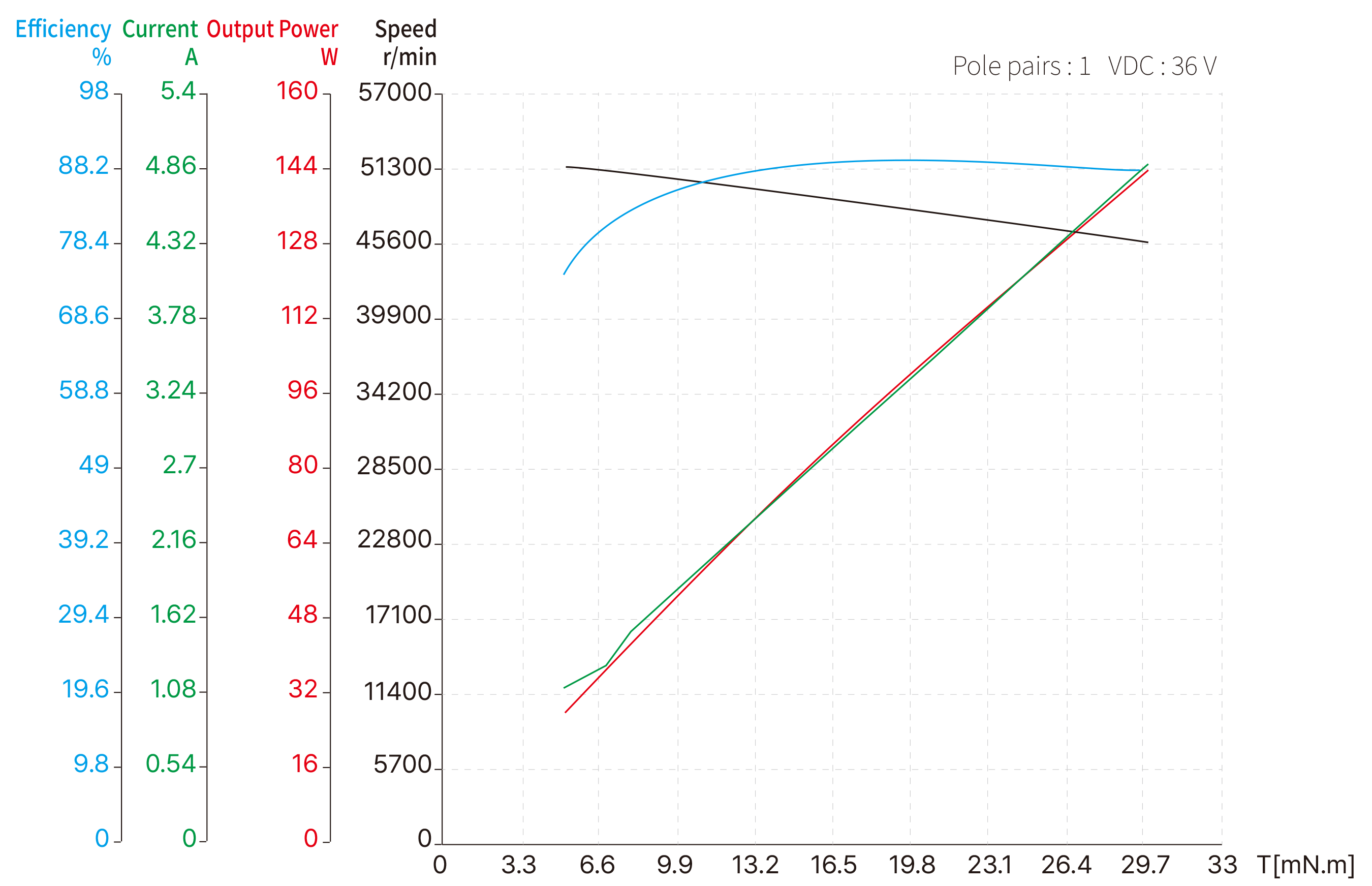
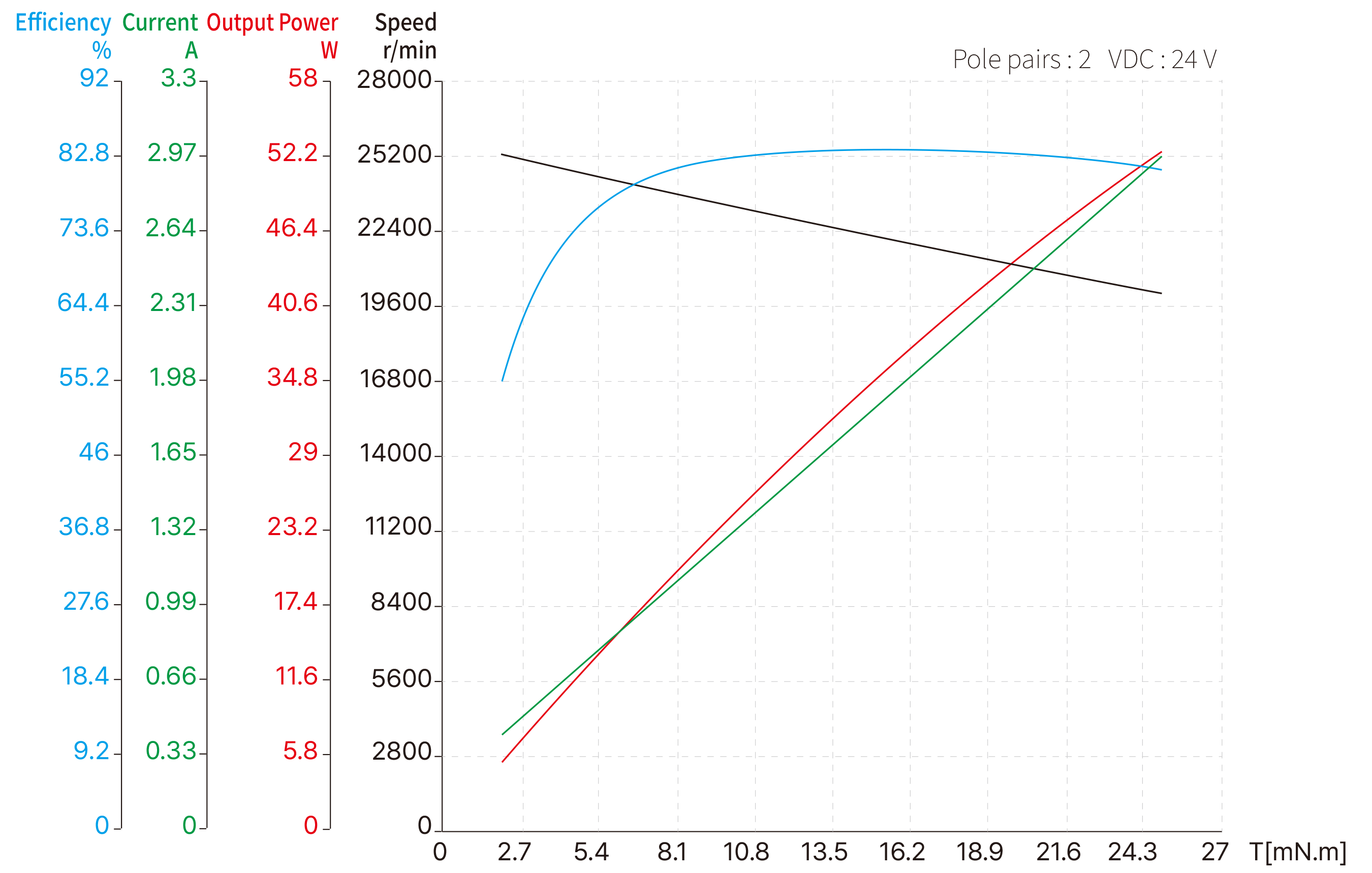
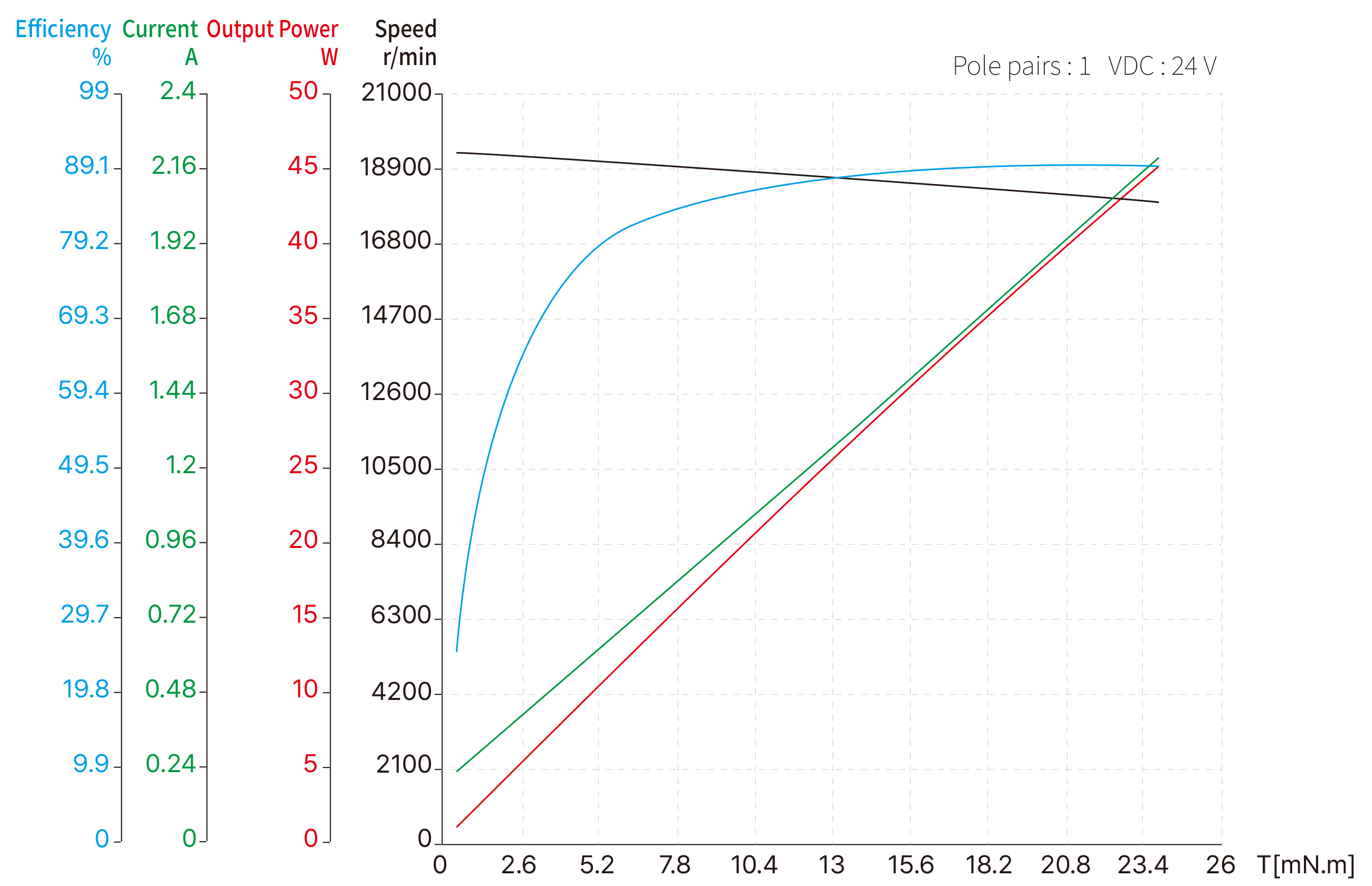
| Pole pairs | - | 1 | 1 | 1 | 1 | 2 | 1 | |
| Terminal resistance, Phase-Phase | Ω | 0.26 | 0.3 | 0.57 | 1 | 0.94 | 0.63 | |
| Terminal inductance, Phase-Phase | mH | 0.018 | 0.027 | 0.06 | 0.11 | 0.057 | 0.061 | |
| Winding connection method | - | Star connection | Star connection | Star connection | Star connection | Star connection | Star connection | |
| Insulation class | - | B | B | B | B | B | B | |
| Duty type | - | S2 | S2 | S2 | S2 | S1 | S2 | |
| Feedback method | - | Hall sensor | Hall sensor | Hall sensor | Hall sensor | Hall sensor | Hall sensor | |
| Commutation angle | - | 120° | 120° | 120° | 120° | 120° | 120° | |
|
Insulation strength (Withstand voltage) |
- | 500VAC/1KHz/1mA/1s | ||||||
| Insulation resistance | - | 100 MΩ/500VDC | ||||||
| Weight | g | 110 | 110 | 110 | 110 | 110 | 140 | |
| Rated voltage | V | 18 | 24 | 36 | 48 | 24 | 24 | |
| Rated power | W | 83 | 100 | 100 | 100 | 53 | 38.24 | |
| Rated torque | mN·m | 20 | 20 | 20 | 20 | 25 | 20 | |
| Rated speed | RPM | 40000 | 49000 | 47400 | 49600 | 20100 | 18200 | |
| Rated current | A | 7.95 | 4.68 | 3.12 | 2.29 | 3 | 1.86 | |
| No load speed | RPM | 50000 | 55000 | 53000 | 54000 | 25700 | 19300 | |
| No load current | A | 0.3 | 0.4 | 0.32 | 0.14 | 0.18 | 0.126 | |
| Motor efficiency | % | 87 | 89 | 89 | 91 | 81 | 89.7 | |
|
Noise (Ambient noise 20dB, test distance 1m) |
dB | <50 | <50 | <50 | <50 | <50 | <50 | |
| Thermal resistance | K/W | 12.6 | 11.9 | 11.5 | 12.8 | 12.2 | 9.8 | |
| Thermal time constant | S | 648 | 648 | 648 | 648 | 620 | 1.86 | |
| Ambient temperature | ℃ | 21.4 | 22 | 24.7 | 21.1 | 24 | 22.3 | |
| Max winding temperature | ℃ | 155 | 155 | 155 | 155 | 82 | 100 | |
| Torque constant | mN·m/A | 2.52 | 4.27 | 6.41 | 8.74 | 8.33 | 11.87 | |
| Back-EMF constant - peak value | V/Krpm | 0.37 | 0.63 | 0.95 | 1.29 | 1.23 | 1.758 | |
| Back-EMF constant - effective value | V/Krpm | 0.26 | 0.45 | 0.67 | 0.91 | 0.87 | 1.24 | |
| Peak torque | mN·m | 116.11 | 341.76 | 404.72 | 419.33 | 212.77 | 320 | |
| Peak current | A | 46 | 80 | 63 | 48 | 26 | 33.5 | |
| Rotor inertia | g·cm² | 1.15 | 1.15 | 1.15 | 1.15 | 1.15 | 3 | |
| Mechanical time constant | ms | 4.72 | 1.89 | 1.60 | 1.51 | 1.56 | 1.34 | |
| End bell | - | Stainless steel | ||||||
| Bearing | - | Deep groove ball bearing | ||||||
| Magnet | - | Sinter NdFeB | ||||||
| Rotation shaft | - | Carbon steel | ||||||

In a mobile environment, you can move left and right to see the contents (tables).
| Stage | - | Stage 1 | Stage 2 | Stage 3 | Stage 4 |
|---|---|---|---|---|---|
| Gear ratio | X : 1 | 3.9, 5.3 | 16, 21, 28 | 62, 83, 111, 150 | 243, 326, 439, 590, 794 |
| Max. backlash | ° | 0.85 | 1.05 | 1.2 | 1.35 |
| Max. continuous output power | W | 24 | 12 | 6.0 | 1.6 |
| Max. peak output power | W | 30 | 15 | 7.5 | 2.0 |
| Max. continuous input speed | rpm | 8000 | 10000 | 10000 | 10000 |
| Max. peak input speed | rpm | 10000 | 12500 | 12500 | 12500 |
| Max. continuous torque | N.m | 0.5 | 0.7 | 1.2 | 1.5 |
| Max. peak torque | N.m | 0.6 | 0.9 | 1.5 | 1.9 |
| Max. efficiency | % | 90 | 81 | 74 | 66 |
| Weight | g | 59 | 83 | 97 | 112 |
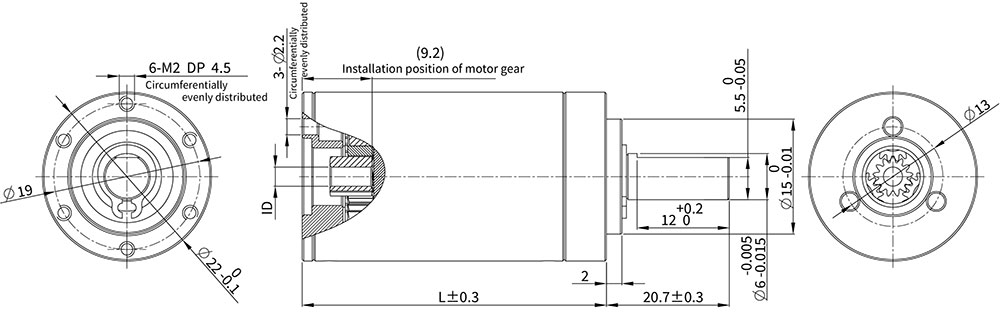
| Gearbox length L | mm | 22.3 | 33 | 39.6 | 46.3 |

Silent
A high-performance gear reduction solution that delivers both stable torque transmission and low-noise operation, built on precision gear machining technology. Compatible with a wide range of DINGS' motors and applicable across diverse industries including robotics, automation equipment, and precision machinery.
Explore available specifications and gear ratio options on the DKPS website below.
View details on DKPS →