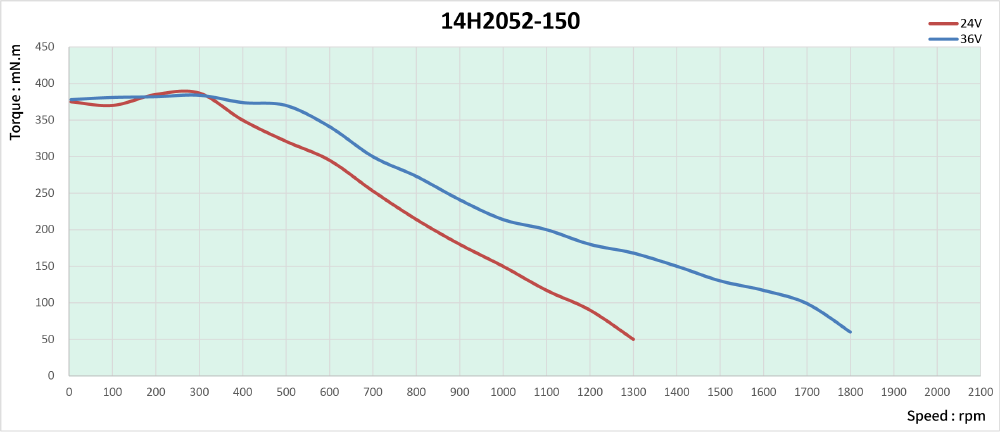
The size 14 [35mm] Hybrid Rotary Stepper Motor has Max. 0.4N·m of holding torque.
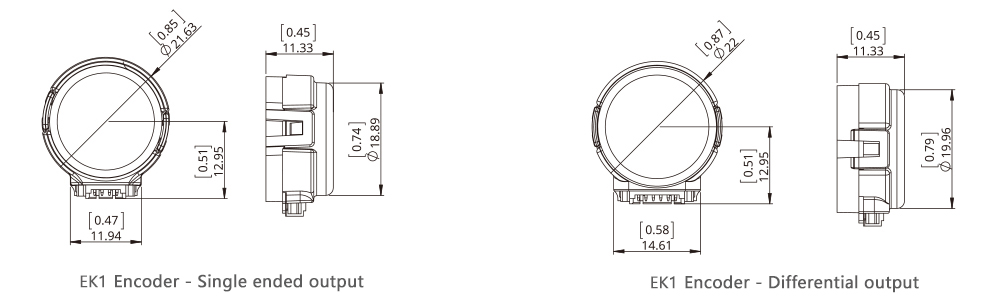
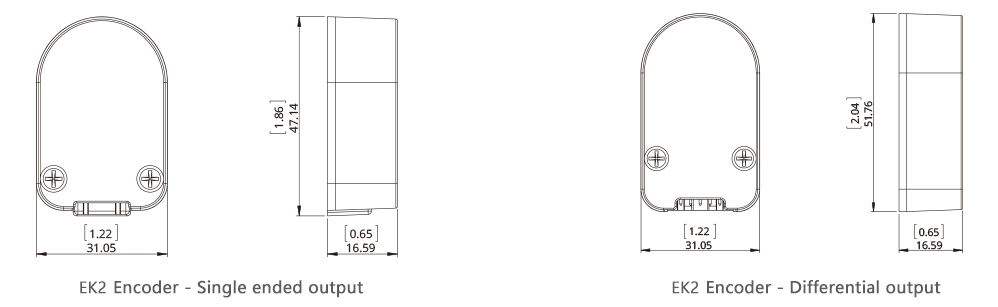
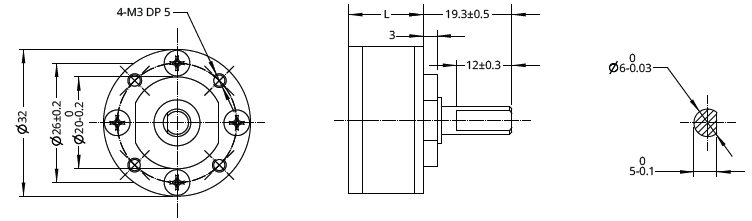
Encoders and 32mm frame planetary gearbox solutions are available.
For special windings or customization, Please contact DINGS' for further information.

In a mobile environment, you can move left and right to see the contents (tables).
| General | |||||||
|---|---|---|---|---|---|---|---|
| Accuracy | Step angle | 1.8°±5% | |||||
| Resistance | ±10% @ 20 °C | ||||||
| Inductance | ±20% @ 1 kHz | ||||||
| Insulation class | B | ||||||
| Duty type | S1 | ||||||
| Dielectric strength | 500 VAC / 1 KHz / 1 mA / 1 s | ||||||
| Insulation resistance | 100 MΩ / 500 VDC | ||||||
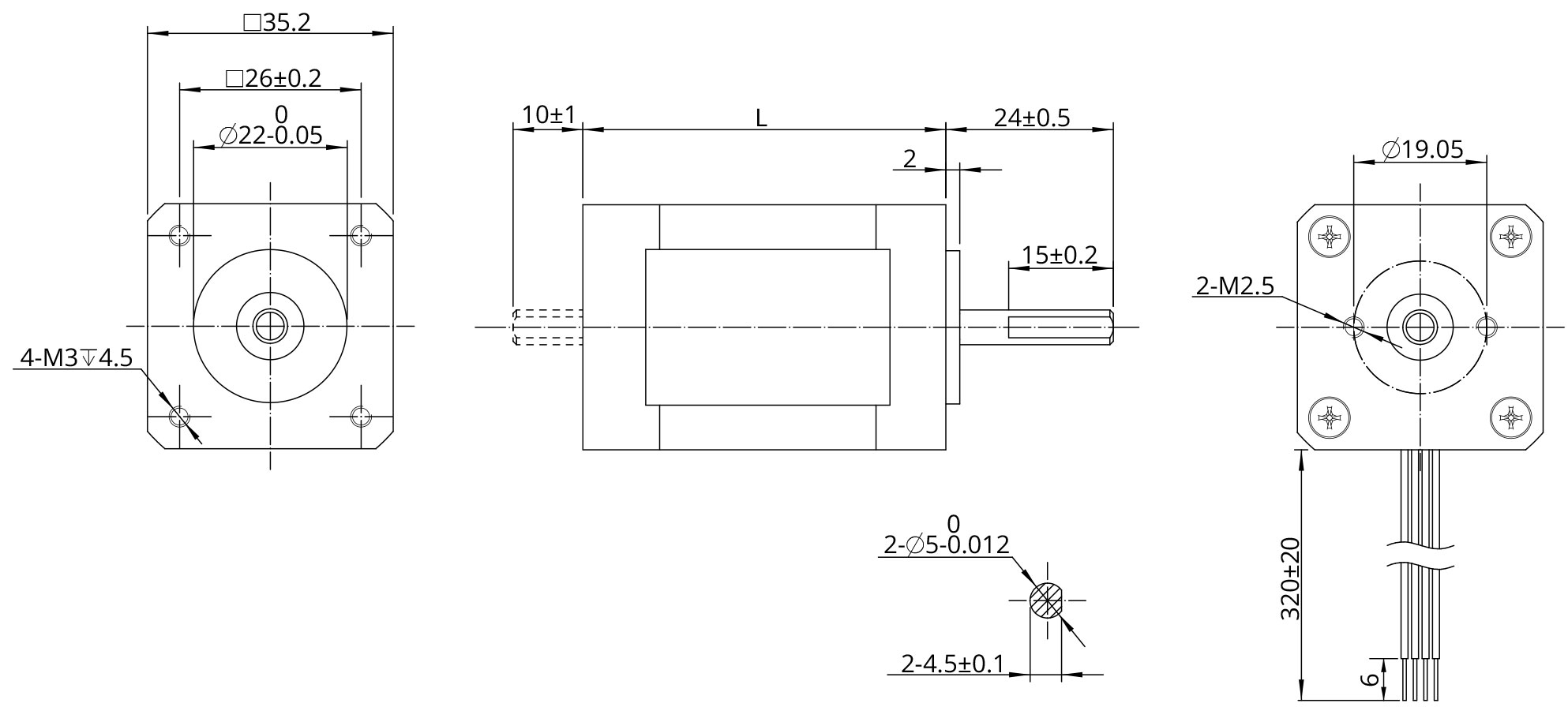
| Permissible radial load (5MM distance from mounting surface) |
Permissible radial load (10MM distance from mounting surface) |
Permissible radial load (15MM distance from mounting surface) |
Permissible radial load (20MM distance from mounting surface) |
||||
| 50N | 40N | 25N | 20N | ||||
| Parameter | |||||||
| Type | Current (A [RMS]) |
Resistance (Ω) |
Inductance (mH) |
Holding Torque (N·m) |
Rotor Inertia (g·cm2) |
Length (mm) |
Mass (g) |
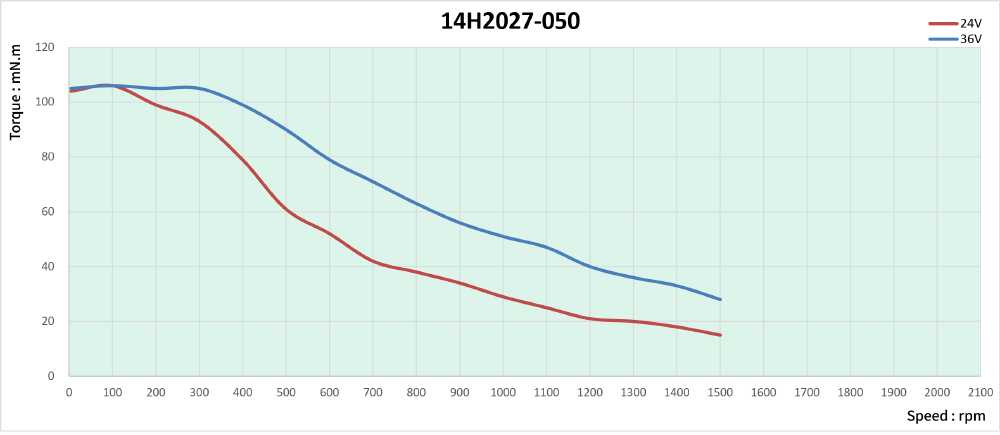
| 14H2027 | 0.5 | 10.3 | 5.9 | 0.1 | 12 | 27 | 150 |
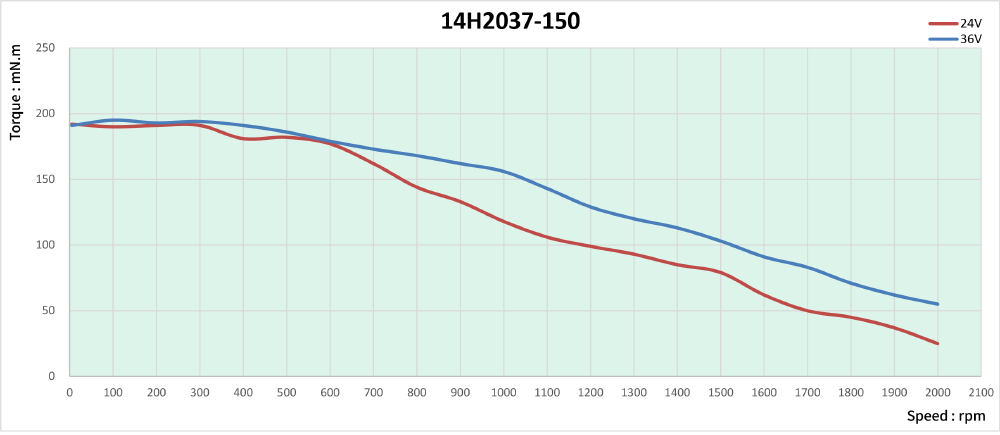
| 14H2037 | 1.5 | 1.7 | 1.4 | 0.2 | 20 | 37 | 210 |
| 14H2052 | 1.5 | 2.7 | 2.8 | 0.4 | 35 | 52 | 250 |
| Material | |||||||
| End bell | Aluminum alloy | ||||||
| Bearing | Deep groove ball bearing | ||||||
| Magnet | Sintered NdFeB | ||||||
| Shaft | Stainless steel | ||||||
| Wiring | UL 3265, 26 AWG | ||||||

In a mobile environment, you can move left and right to see the contents (tables).
| Resolution(CPR) | 100 | 108 | 120 | 125 | 128 | 200 | 250 | 256 | 300 | 360 | 400 | 500 | 1000 | 512 | 720 | 800 |
| Single ended output | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| Differential output | A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P |

In a mobile environment, you can move left and right to see the contents (tables).
| Resolution(CPR) | 50 | 100 | 192 | 200 | 250 | 256 | 360 | 400 | 500 | 720 | 900 | 1000 | 1250 | 2000 | 2500 | 4000 | 5000 |
| Single ended output | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | ||||
| Differential output | A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q |
In a mobile environment, you can move left and right to see the contents (tables).
| House material | Metal | |||||
| No load backlash | 1° | |||||
| Bearing | Ball bearing | |||||
| Ratio | Rated torque (N.m) |
Limit torque (N·m) |
Stages | Efficiency (%) |
Length (mm) |
Mass (g) |
|---|---|---|---|---|---|---|
| 3.3 | 0.5 | 1.5 | 1 | 90 | 16.2 | 90 |
| 4.6 | ||||||
| 11.2 | 1 | 3 | 2 | 81 | 21.9 | 115 |
| 15.5 | ||||||
| 21.5 | ||||||
| 37.7 | 2.5 | 7.5 | 3 | 73 | 27.7 | 140 |
| 72 | ||||||
![Size 14 [35mm]](/img/products/09/brake/External-main.png)
In a mobile environment, you can move left and right to see the contents (tables).
| Rated voltage | DC 24V ± 5% | |
|---|---|---|
| Resistance | 217Ω ± 10% | |
| Power | 4W | |
| Hold torque | >0.3N.M | |
| Insulation | B | |
| Insulation resistance | >100MΩ (DC500V) | |
| Dielectric strength | AC 1000V for 1 sec | |
| Retraction time | 50ms | |
| Release time | 50ms | |
| Gyration gap | 1° | |
| Emergency brake cycle | 200 cycles | |
| Lifetime | 500,000 cycles | |
| Noise level | <60db | |
![Size 14 [35mm]](/img/products/09/brake/35mm.png)